
niusouti.com
异步电动机矢量控制系统中,为什么要设置直角坐标l极坐标变换器、矢量旋转器和3相12相变换器?它们的作用是什么?
题目
异步电动机矢量控制系统中,为什么要设置直角坐标l极坐标变换器、矢量旋转器和3相12相变换器?它们的作用是什么?
相似考题
更多“异步电动机矢量控制系统中,为什么要设置直角坐标l极坐标变换器、矢”相关问题
-
第1题:
利用函数文件,实现直角坐标(x,y)与极坐标(ρ,θ)之间的转换。已知极坐标的矢径、极角分别为:
函数文件:
文件名:transform
程序:
function[r,theta]=transform(x,y)
r=sqrt(x*x+y*y);
theta=atan(y/x);
函数调用:
程序:
x=input(’Pleaseinputx=:’);
y=input(’Pleaseinputy=:’);
[r,theta]=transform(x,y);
disp([’矢径r为:’,num2str(r),’’,’极角theta为:’,num2str(theta)]) -
第2题:
为什么要设置低压控制系统?
众所周知,一台电除尘器使用效果如何,除了设计先进、合理的电除尘器(本体)和控制特性优良的高压供电装置之外,还必须有一整套低压控制系统与它们密切配合,这样才能获得预期的收尘效果。近几十年来,我国的电除尘技术落发展迅速,理论和实践充分证明,低压控制系统成了电除尘系统必不可少的三大组成之一。它是一种多功能的自动控制系统,这种系统控制特性的好坏和控制功能完善与否,对于提高电除尘器运行的自动化程度,改善运行状况,减轻维护人员的劳动强度,提高电除尘器的除尘效率,都有着直接的影响。
略 -
第3题:
工业机器人按坐标形式可分为()等机器人类型。
- A、直角坐标、圆柱坐标和极坐标
- B、圆柱坐标、极坐标和关节坐标
- C、直角坐标、圆柱坐标、极坐标和关节坐标
- D、关节坐标、直角坐标和圆柱坐标
正确答案:C -
第4题:
AutoCAD软件中,只有直角坐标和极坐标两种输入坐标的方法。
正确答案:错误 -
第5题:
简述异步电动机按转子磁链定向矢量控制系统的特点。
正确答案:按转子磁链定向,实现了定子电流励磁分量和转矩分量的解耦,需要电流闭环控制;转子磁链系统的控制对象是稳定的惯性环节,可以采用磁链闭环控制,也可以是开采用连续的PI控制,转矩与磁链变换平稳,电流闭环控制可有效地限制启、制动电流。 -
第6题:
默认设置下,状态栏上的图形坐标读数器位置上显示的是()。
- A、光标所处位置的绝对直角坐标
- B、光标所处位置的绝对极坐标
- C、光标所处位置的相对直角坐标
- D、光标所处位置的相对极坐标
正确答案:A -
第7题:
下列哪些属于绘图方式()
- A、相对直角坐标
- B、相对极坐标
- C、绝对极坐标
- D、绝对直角坐标
正确答案:A,B,C,D -
第8题:
简述极坐标和直角坐标牛顿法比较。
正确答案: (1)修正方程数目分别为2(n-1)个及N-1+M个,极坐标方程式少了n-1-m个(pv节点数),在pv节点所占比例不大是,两者的方程数目基本接近2(n-1)
(2)雅可比短阵的元素都是节点电压的函数,每次迭代,雅可比矩阵都需要重新形成。
(3)分析雅可比矩阵的非对角元素的表示式可见,某个非对角元素是否为零决定于相应的节点导纳矩阵元素是否为零。因此如将修正方程式按节点号的次序排列,井将雅可比矩阵分块,把每个2×2的子阵作为一个元素,则按节点顺序而成的分块雅可比矩阵将和节点导纳矩阵具有同样的稀疏结构,是一个高度稀疏的矩阵。(4)和节点导纳矩阵具有相同稀疏结构的分块雅可比矩阵在位置上对称,但由于数值上不等,说以,雅可比矩阵式一个不对称矩阵。 -
第9题:
问答题简述异步电动机按转子磁链定向矢量控制系统的特点。正确答案: 按转子磁链定向,实现了定子电流励磁分量和转矩分量的解耦,需要电流闭环控制;转子磁链系统的控制对象是稳定的惯性环节,可以采用磁链闭环控制,也可以是开采用连续的PI控制,转矩与磁链变换平稳,电流闭环控制可有效地限制启、制动电流。解析: 暂无解析 -
第10题:
单选题在曲线测设中,坐标法包括()。A直角坐标法和极坐标法
B大地坐标法和极坐标法
C直角坐标法和大地坐标法
D大地坐标法、直角坐标法和极坐标法
正确答案: B解析: 暂无解析 -
第11题:
多选题下列哪些属于绘图方式()A相对直角坐标
B相对极坐标
C绝对极坐标
D绝对直角坐标
正确答案: C,A解析: 暂无解析 -
第12题:
问答题绝对直角坐标、绝对极坐标、相对直角坐标、相对极坐标如何输入?正确答案: 在绘制图形时,AutoCAD是通过坐标系统来确定一个图元在空间中的位置。坐标系统主要分为“绝对直角坐标”、“绝对极坐标”、“相对直角坐标”、“相对极坐标”四种。 绝对直角坐标:即输入点的X值和Y值,坐标间用逗号隔开,如1000,2000。 相对直角坐标:指相对前一点的直角坐标,其表达方式是在绝对坐标表达式前加@,如@1000,2000。 绝对极坐标:输入该点距坐标系圆点的距离以及这两点的连线与X轴正方向的夹角,中间用“﹤”号隔开,如,200<30。相对极坐标:指相对于前一点的极坐标值,表达方式也为在极坐标前加@,如@200<30。解析: 暂无解析 -
第13题:
曲线L的极坐标方程是 ,则L在点
,则L在点 处的切线的直角坐标方程是________答案:解析:
处的切线的直角坐标方程是________答案:解析: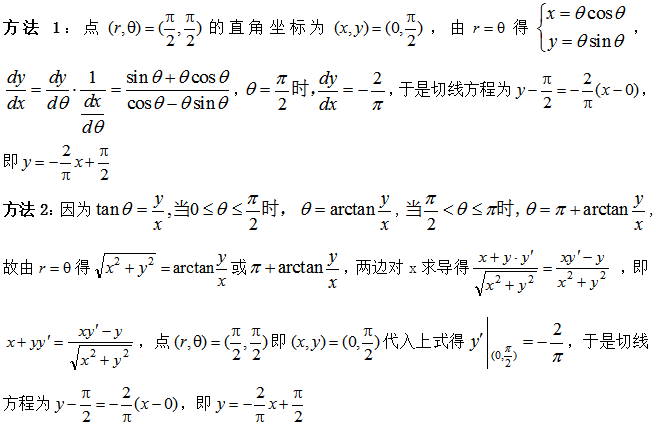
-
第14题:
在曲线测设中,坐标法包括()。
- A、直角坐标法和极坐标法
- B、大地坐标法和极坐标法
- C、直角坐标法和大地坐标法
- D、大地坐标法、直角坐标法和极坐标法
正确答案:A -
第15题:
“极坐标”滤镜可以将图像坐标从极坐标系转化成直角坐标系。
正确答案:错误 -
第16题:
为什么要设置怠速控制系统,其由那几部分组成?
正确答案: 怠速控制系统的功能:用高怠速实现发动机起动后的快速暖机过程;自动维持发动机怠速在目标转速下稳定运转。怠速控制系统的组成:主要由传感器、ECU、和执行元件三部分组成。 -
第17题:
基于异步电动机动态数学模型的高性能交流调速系统主要有矢量控制系统和直接转矩控制系统。
正确答案:正确 -
第18题:
简述什么是矢量变换?为什么要进行矢量变换控制?
正确答案: 矢量变换控制原理的基本思想是通过变换把异步电动机变成类似于直流电动机,即调速控制就方便了。矢量变换控制的基本思路是,借助坐标变换手段,将异步电动机放在旋转的坐标轴系分析其数学模型,找出类似直流电动机的激磁电流分量和转矩电流分量,分别控制。即控制激磁电流分量为恒定值,根据负载大小控制转矩电流分量,再经过坐标变换电路的作用将这两个标量(直流量)变换成三相交流量,对异步电动机供电,从而达到改造异步电动机转矩控制特性的目的。变异步电动机原有的非线性机械特性为线性的,从而扩大了调速范围。由于系统要随时控制转子磁链的大小和方向,故称为矢量变换控制。在日本又称其为磁场定向控制,即要控制磁链的方向。 -
第19题:
GIS工作于两种不同的基本地理模式()。
- A、矢量模式和栅格模式
- B、矢量模式和极坐标模式
- C、栅格模式和极坐标模式
- D、极坐标模式和球坐标模式
正确答案:A -
第20题:
问答题异步电动机矢量控制系统中,为什么要设置直角坐标l极坐标变换器、矢量旋转器和3相12相变换器?它们的作用是什么?正确答案: 在矢量控制系统中,先将A、B、三相坐标变换成a、β坐标系,再将a、β坐标系变成磁场定向的M、T坐标系。另外,还需要检测出磁链(磁通)的大小和相位,由于这些矢量变换最后必须将直流量还原为交流量以控制交流电动机,因此,这些运算功能的变换必须是可逆的。
(1)3相12相变换器(3/2)根据旋转磁场等效的原则,用一个对称的两相统组代替对称三相绕组,并且保持变换前后功率不变,这就是3/2变换的实质。
(2)矢量旋转变换器(VR)
a、β绕组和直流M、T绕组均为两相绕组,后者是旋转的直角坐标系;前者是静止的直角坐标系,它们之间的变换属于矢量旋转变换,这种变换的运算功能由矢量旋转变换器(VR)来完成。
(3)直角坐标/极坐标变换器(K/P)
矢量变换控制系统中,有时需将直角坐标变换为极坐标,用极坐标的矢径和极角表示矢量。这个功能由直角坐标/极坐标变换器来完成。解析: 暂无解析 -
第21题:
多选题AutoCAD中常用的世界坐标有()。A绝对直角坐标
B相对直角坐标
C绝对极坐标
D相对极坐标
E用户坐标
正确答案: B,A解析: 暂无解析 -
第22题:
单选题默认设置下,状态栏上的图形坐标读数器位置上显示的是()。A光标所处位置的绝对直角坐标
B光标所处位置的绝对极坐标
C光标所处位置的相对直角坐标
D光标所处位置的相对极坐标
正确答案: B解析: 暂无解析 -
第23题:
单选题天文观测时要最终把日心黄道直角坐标转换成()A极坐标
B平面直角坐标
C观测站上的所见位置
D日心赤道坐标
正确答案: A解析: 暂无解析