
niusouti.com
在机器人程序编写过程中,下列各项描述错误的是()A、逻辑运算符号AND与OR组合使用时没有使用数量限制B、PR[16]=LP0S表示把当前机器人的关节坐标系保存到PR[16]中C、ACC的可设置范围是50-200D、在焊接指令中,利用CNT与FINE都不能控制焊枪提前关闭
题目
在机器人程序编写过程中,下列各项描述错误的是()
- A、逻辑运算符号AND与OR组合使用时没有使用数量限制
- B、PR[16]=LP0S表示把当前机器人的关节坐标系保存到PR[16]中
- C、ACC的可设置范围是50-200
- D、在焊接指令中,利用CNT与FINE都不能控制焊枪提前关闭
相似考题
更多“在机器人程序编写过程中,下列各项描述错误的是()A、逻辑运算符号AND与OR组合使用时没有使用数量限制B、PR[16]=LP0S表示把当前机器人的关节坐标系保存到PR[16]中C、ACC的可设置范围是50-200D、在焊接指令中,利用CNT与FINE都不能控制焊枪提前关闭”相关问题
-
第1题:
在机器人控制系统中最多可以存储( )个工具坐标系。A.13
B.14
C.15
D.16
参考答案:D
-
第2题:
在弧焊机器人作业过程中,焊枪是一个重要的执行工具,需要定期更换或清理。( )此题为判断题(对,错)。
参考答案:对
-
第3题:
如图7.3所示的树形文件系统中,方框表示目录,圆圈表示文件,“/”表示路径的分隔符,“/”在路径之首表示根目录。
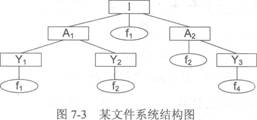 在图7.3中,假设当前目录是Al,“pr”表示打印命令,那么打印根目录中的文件fl的正确命令是 (9) 。 A.prAl/Yl/fl B.prYl/fl..C.pr../fl D.pr..fl正确答案:C
在图7.3中,假设当前目录是Al,“pr”表示打印命令,那么打印根目录中的文件fl的正确命令是 (9) 。 A.prAl/Yl/fl B.prYl/fl..C.pr../fl D.pr..fl正确答案:C
要点解析:在图7—3文件系统的树形目录结构中,树的根节点为根目录,数据文件作为树叶,其他所有目录均作为树的节点。从树根开始,把全部目录文件名与数据文件名,依次用“/”连接起来,构成该数据文件的路径名。从树根开始的路径名称为绝对路径名,从当前目录开始的路径名称为相对路径名。假设当前目录是Al,“pr”表示打印命令,那么打印根目录中的文件n的正确命令是“pr../fl”,其中“..”表示当前目录的上一级目录,恰好为根目录。因此,本试题的正确答案为C。 -
第4题:
试题三(共15分)
阅读下列说明和图,回答问题1至问题3,将解答填入答题纸的对应栏内。
【说明】
某软件公司欲设计实现一个虚拟世界仿真系统。系统中的虚拟世界用于模拟现实世界中的不同环境(由用户设置并创建),用户通过操作仿真系统中的1~2个机器人来探索虚拟世界。机器人维护着两个变量b1和b2,用来保存从虚拟世界中读取的字符。
该系统的主要功能描述如下:
(1)机器人探索虚拟世界(RunRobots)。用户使用编辑器(Editor)编写文件以设置想要模拟的环境,将文件导入系统(LoadFile)从而在仿真系统中建立虚拟世界(SetupWorld)。机器人在虚拟世界中的行为也在文件中进行定义,建立机器人的探索行为程序(SetupProgram)。机器人在虚拟世界中探索时(RunProgram),有2种运行模式:
①自动控制(Run):事先编排好机器人的动作序列(指令(Instruction)),执行指令,使机器人可以连续动作。若干条指令构成机器人的指令集(InstructionSet)。
②单步控制(Step):自动控制方式的一种特殊形式,只执行指定指令中的一个动作。
(2)手动控制机器人(ManipulateRobots)。选定1个机器人后(SelectRobot),可以采用手动方式控制它。手动控制有4种方式:
①Move:机器人朝着正前方移动一个交叉点。
②Left:机器人原地沿逆时针方向旋转90度。
③Read:机器人读取其所在位置的字符,并将这个字符的值赋给b1;如果这个位置上没有字符,则不改变b1的当前值。
④Write:将b1中的字符写入机器人当前所在的位置,如果这个位置上已经有字符,该字符的值将会被b1的值替代。如果这时b1没有值,即在执行Write动作之前没有执行过任何Read动作,那么需要提示用户相应的错误信息(ShowErrors)。
手动控制与单步控制的区别在于,单步控制时执行的是指令中的动作,只有一种控制方式,即执行下个动作;而手动控制时有4种动作。
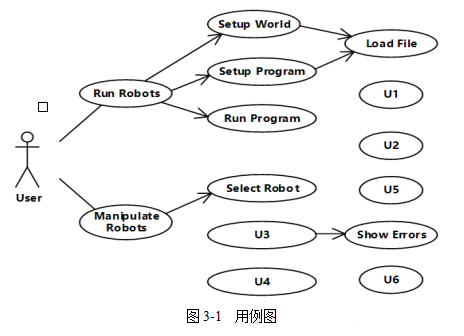
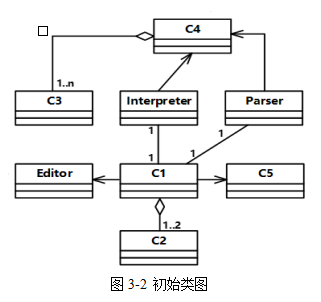
现采用面向对象方法设计并实现该仿真系统,得到如图3-1所示的用例图和图3-2所示的初始类图。图3-2中的类“Interpreter”和“Parser”用于解析描述虚拟世界的文件以及机器人行为文件中的指令集。

图3-1用例图
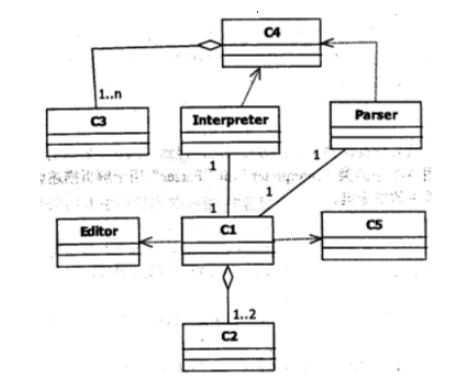
图3-4初始类图
【问题1】(6分)
根据说明中的描述,给出图3-1中U1~U6所对应的用例名。
【问题2】(4分)
图3-1中用例U1~U6分别与哪个(哪些)用例之间有关系,是何种关系?
【问题3】(5分)
根据说明中的描述,给出图3-2中C1~C5所对应的类名。
正确答案: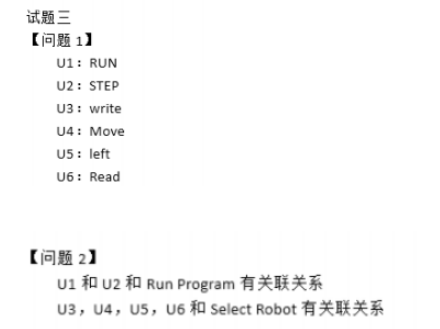
【问题3】c1:文件
C2:机器人在虚拟世界的行为
C3:Instruction
C4:InstructionSet
C5:仿真系统
-
第5题:
能够完成机器人简单程序的编写与编辑以及机器人的启动与停止操作的是().
A机器人控制柜
B计算机控制系统
C示教器
D机器人编码控制器
C
略 -
第6题:
下列说明中,是描述汇编语言的是()。
- A、编写程序与计算机的硬件结构没有多大关系
- B、用二进制编码表示每条指令,它是计算机能直接识别和执行的语言
- C、高级语言
- D、是用助记符、符号和数字等来表示指令的程序语言
正确答案:D -
第7题:
在PR1592小型配料控制器的物料表中设置的:能够为本次配料留取“提前量”的参数是()
- A、细称值
- B、过冲量
- C、精度范围
- D、无流量
正确答案:B -
第8题:
关于机器人报警的重要程序,下面描述正确的是()
- A、STOP报警中断或者强制结束程序执行,会使机器人断开伺服电源、瞬间停止,大多是由于硬件异常造成的。
- B、SYSTEM报警,通常是发生在与系统相关的重大问题引起的。
- C、SEVRO报警中断程序执行,使机器人运动在减速后停止。
- D、.PAUSE报警,中断程序执行,使机器人在完成动作后停止。
正确答案:B,D -
第9题:
机器人故障移动机器人后要满足哪些条件才可走线()
- A、故障的机器人已显示在HOME的位置
- B、机运链处于运行状态
- C、自动生产模式
- D、坐标系状态处于关闭
正确答案:A,B,C,D -
第10题:
在虚拟仿真系统中,程序选项卡()命令可在更改机器人的位置、坐标框或者这些参照的任何其他对象时,使机器人3D空间中的位置不会移动。
- A、至世界(坐标系)
- B、限位停止
- C、至参考(坐标系)
- D、信号
正确答案:A -
第11题:
在使用机器人焊接时,焊接质量与下列哪些因素有关()
- A、工件的装配精度
- B、焊接电流、焊接电压的设置
- C、工件的装配尺寸
- D、机器人的重复性
正确答案:A,B,C,D -
第12题:
单选题下列说明中,是描述汇编语言的是()。A编写程序与计算机的硬件结构没有多大关系
B用二进制编码表示每条指令,它是计算机能直接识别和执行的语言
C高级语言
D是用助记符、符号和数字等来表示指令的程序语言
正确答案: A解析: 暂无解析 -
第13题:
( )是用来描述当前机器人第六轴末端工具位姿特性的坐标系。A.极坐标
B.关节坐标
C.工具坐标系
D.工件坐标系
参考答案:C
-
第14题:
如图2-5所示的树形文件系统中,方框表示目录,圆圈表示文件,“/”表示路径的分隔符,“/”在路径之首表示根目录。
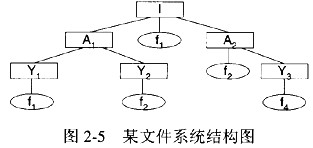
在图2-5中,假设当前目录是A1,“pr'’表示打印命令,那么打印根目录中的文件f1的正确命令是(23)。
A.pr A1/Y1/f1
B.pr Y1/f1
C.pr../f1
D.pr..f1
正确答案:C
解析:在图2-5文件系统的树形目录结构中,树的根节点为根目录,数据文件作为树叶,其他所有目录均作为树的节点。从树根开始,把全部目录文件名与数据文件名,依次用“/”连接起来,构成该数据文件的路径名。从树根开始的路径名称为绝对路径名,从当前目录开始的路径名称为相对路径名。假设当前目录是A1,“pr”表示打印命令,那么打印根目录中的文件f1的正确命令是“pr../f1”,其中“..”表示当前目录的上一级目录,恰好为根目录。因此,(23)空缺处的正确答案为C。 -
第15题:
能够完成机器人简单程序的编写与编辑以及机器人的启动与停止操作的是()
A.机器人控制柜
B.计算机控制系统
C.示教器
D.机器人编码控制器
正确答案:C
-
第16题:
阅读下列说明和图,回答问题1至问题3,将解答填入答题纸的对应栏内。
【说明】
????某软件公司欲设计实现一个虚拟世界仿真系统。系统中的虚拟世界用于模拟现实世界中的不同环境(由用户设置并创建),用户通过操作仿真系统中的1~2个机器人来探索虚拟世界。机器人维护着两个变量b1和b2,用来保存从虚拟世界中读取的字符。
????该系统的主要功能描述如下:
????(1)机器人探索虚拟世界(Run Robots)。用户使用编辑器(Editor)编写文件以设置想要模拟的环境,将文件导入系统(Load File)从而在仿真系统中建立虚拟世界(Setup World)。机器人在虚拟世界中的行为也在文件中进行定义,建立机器人的探索行为程序(Setup Program)。机器人在虚拟世界中探索时(Run Program),有2种运行模式:
????①自动控制(Run):事先编排好机器人的动作序列(指令(Instruction)),执行指令,使机器人可以连续动作。若干条指令构成机器人的指令集(Instruction Set)。
????②单步控制(Step):自动控制方式的一种特殊形式,只执行指定指令中的一个动作。
????(2)手动控制机器人(Manipulate Robots)。选定1个机器人后(Select Robot),可以采用手动方式控制它。手动控制有4种方式:
????①Move:机器人朝着正前方移动一个交叉点。
????②Left:机器人原地沿逆时针方向旋转90度。
????③Read:机器人读取其所在位置的字符,并将这个字符的值赋给b1;如果这个位置上没有字符,则不改变b1的当前值。
????④Write:将b1中的字符写入机器人当前所在的位置,如果这个位置上已经有字符,该字符的值将会被b1的值替代。如果这时b1没有值,即在执行Write动作之前没有执行过任何Read动作,那么需要提示用户相应的错误信息(Show Errors)。
????手动控制与单步控制的区别在于,单步控制时执行的是指令中的动作,只有一种控制方式,即执行下个动作;而手动控制时有4种动作。
????现采用面向对象方法设计并实现该仿真系统,得到如图3-1所示的用例图和图3-2所示的初始类图。图3-2中的类“Interpreter”和“Parser”用于解析描述虚拟世界的文件以及机器人行为文件中的指令集。
【问题1】(6分)
????根据说明中的描述,给出图3-1中U1~U6所对应的用例名。
【问题2】(4分)
????图3-1中用例U1~U6分别与哪个(哪些)用例之间有关系,是何种关系?
【问题3】(5分) ???
????根据说明中的描述,给出图3-2中C1~C5所对应的类名。答案:解析:【问题1】(6分)
U1、U2、U3、U4、U5、U6:Run、Step、Write、Move、Left、Read
【问题2】(4分)
U1和U2和Run Program有泛化关系;U3,U4,U5,U6和Select Robot有扩展关系;
【问题3】(5分)
C1:文件
C2:机器人在虚拟世界的行为
C3:Instruction
C4:InstructionSet
C5:仿真系统 -
第17题:
下说法错误的是()
- A、发那科机器人使用的是相对值脉冲编码器
- B、机器人没有移动可以判断程序必然执行完毕
- C、当控制柜在镜像还原过程中,决不允许掉电
- D、逆向运行程序能连续运行
正确答案:A,B,D -
第18题:
机器人经常使用的程序可以设置为主程序,每台机器人可以设置()主程序。
- A、1个
- B、5个
- C、3个
- D、无限制
正确答案:A -
第19题:
机器人报SRVO—250故障是坐标系与程序里不匹配
正确答案:正确 -
第20题:
下列关于机器人生产运行描述错误的有()
- A、在开机运行前,必须知道机器人将要执行的全部任务
- B、必须知道所有左右移动机器人的开关、传感器和控制信号的位置及状态
- C、当机器人没有移动时,表示已经执行完成了程序
- D、必须知道机器人控制器和外围设备急停按钮的位置,准备紧急情况下使用
正确答案:C -
第21题:
在visual one中,在机器人上装上吸盘,设置吸盘控制时,在机器人的“组件属性”选项卡的动作配置,在信号动作部分中,错时选择()。
- A、发布
- B、扫掠容器开启
- C、跟踪关闭
- D、拆卸工具
正确答案:A -
第22题:
关闭机器人的操作流程为--停止机器人在当前位置、卸载程序、按下急停、关闭电源。
正确答案:错误 -
第23题:
在机器人系统中,与EPS(电子限位开关)配合使用标定机器人位置的组成部分是()。
- A、安全门锁
- B、示教器
- C、同步开关
- D、控制柜
正确答案:C