
niusouti.com
机器人的力雅可比矩阵是速度雅可比矩阵的逆矩阵。
题目
机器人的力雅可比矩阵是速度雅可比矩阵的逆矩阵。
相似考题
参考答案和解析
更多“机器人的力雅可比矩阵是速度雅可比矩阵的逆矩阵。”相关问题
-
第1题:
什么是逆矩阵?参考答案:设A是数域上的一个n阶矩阵,若在相同数域上存在另一个n阶矩阵B,使得:AB=BA=E,则我们称B是A的逆矩阵,而A则被称为可逆矩阵。注:E为单位矩阵。
-
第2题:
雅可比矩阵的特点有()。A、元素是节点电压的函数
B、不是方阵
C、是不对称矩阵
D、按2×2阶子阵分块时与节点导纳有相同的稀疏结构
正确答案:ACD
-
第3题:
速度最快的机器人是( )。A.SCARA机器人
B.Unimate机器人
C.Delta机器人
D.Verstran机器人
答案:C
-
第4题:
用矩阵分块的方法,证明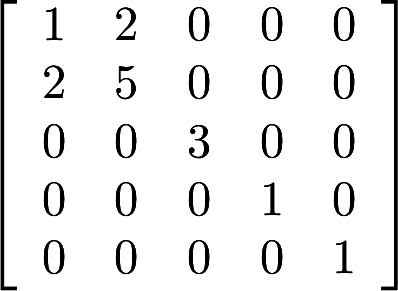 矩阵可逆,并求其逆矩阵.答案:解析:
矩阵可逆,并求其逆矩阵.答案:解析:
-
第5题:
求下面分块矩阵的逆矩阵: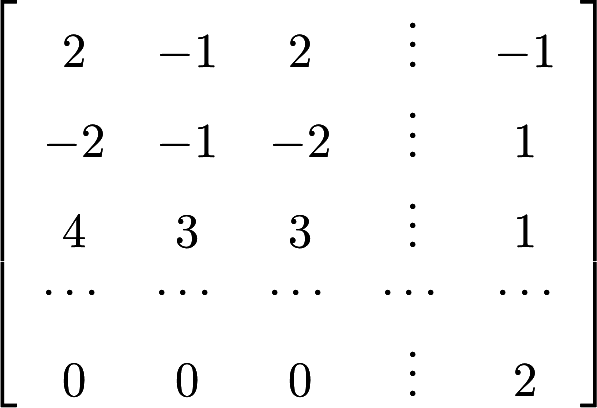 答案:解析:
答案:解析: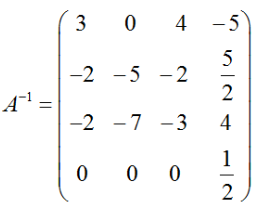
-
第6题:
以下是对称阵的有( )。A.雅可比矩阵
B.节点导纳矩阵
C.节点阻抗矩阵
D.节点电压矩阵答案:B,C解析:节点阻抗阵是节点导纳阵的逆矩阵,两者都为对称性矩阵。雅可比矩阵各元素都是节点电压的函数,它们的数值将在迭代过程中不断地改变。节点电压阵不是对称矩阵,雅可比矩阵也不是对称矩阵。 -
第7题:
求可逆矩阵A的逆矩阵的指令是()
正确答案:inv(A) -
第8题:
机器人的运动速度其实是指()的运动速度
- A、J6轴法兰的中心点
- B、工具中心点
- C、机器人各轴
- D、机器人电机
正确答案:B -
第9题:
为什么等参数单元要采用自然坐标来表示形函数?为什么要引入雅可比矩阵?
正确答案:简化计算,得到形函数的偏导关系。 -
第10题:
单选题对数字图像而言,下列说法错误的是( )。A矩阵越小,图像最大分辨力越高
B矩阵越大,显示图像细节越好
C矩阵越大,图像数据量也越大
D矩阵太大,给图像传输速度带来不利
E临床应用应根据检查目的选择合适的矩阵
正确答案: C解析:
数字图像的空间分辨力是由像素的大小(尺寸)决定的,而像素的大小与矩阵的大小成反比。因此,矩阵越大,像素越小,数字图像的空间分辨力越高。 -
第11题:
单选题在机器人伺服系统中,()可以提供机器人各个臂的位置、运动速度或力的大小信息,将它们与给定的位置、速度或力相比较,则可以得出误差信息。A传感器
B计算机及其接口电路
C驱动器
D传动机构及机器人的手臂
正确答案: B解析: 暂无解析 -
第12题:
问答题以多自由度工业机器人为例,分析讨论机器人的控制:分析讨论工业机器人的位置控制、速度控制、加速度控制和力控制的特点及其区别。正确答案: 位置控制:工业机器人位置控制的目的,就是要使机器人各关节实现预先所规划的运动,最终保证工业机器人终端(手爪)沿预定的轨迹运行。
这类运动控制的特点是连续控制工业机器人手爪(或工具)的位姿轨迹。
一般要求速度可控、轨迹光滑且运动平稳。轨迹控制的技术指标是轨迹精度和平稳性。
速度控制意味着各个关节马达的运动联合进行,并以不同的速度同时运行以保证夹手沿着笛卡尔坐标轴稳定运动。
分解运动速度控制先把期望的夹手运动分解为各个关节的期望速度,然后对各个关节实行速度伺服控制。
加速度控制分解运动加速度控制首先计算出工具的控制加速度,然后把它分解为相应的各个关节加速度,再按照动力学方程计算出控制力矩。
力控制除了在一些自由度方向进行位置控制外,还需要在另一些自由度方向进行力控制。解析: 暂无解析 -
第13题:
雅可比矩阵是对称矩阵。()此题为判断题(对,错)。
正确答案:错误
-
第14题:
简述什么是方阵的逆矩阵?答案及解析:
设A是数域上的一个n阶矩阵,若在相同数域上存在另一个n阶矩阵B,使得: AB=BA=E ,则我们称B是A的逆矩阵,而A则被称为可逆矩阵。注:E为单位矩阵。
-
第15题:
机器人运动学逆问题可用以( )。A.求取机器人末端位姿
B.求取机器人关节变量
C.求取机器人工作空间
D.用以实现机器人控制
答案:BD
-
第16题:
已知 ,求作可s逆矩阵P,使得
,求作可s逆矩阵P,使得 是对角矩阵。答案:解析:
是对角矩阵。答案:解析: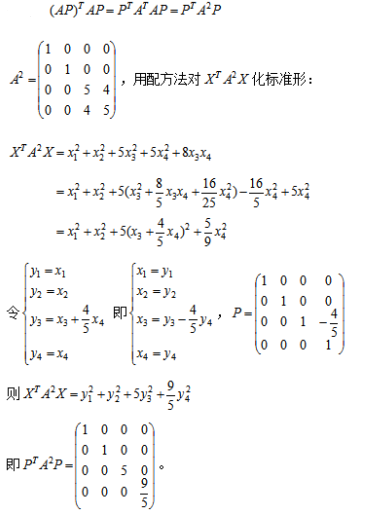
-
第17题:
利用逆矩阵解矩阵方程 。答案:解析:
。答案:解析:
-
第18题:
机器人的实际运行速度=运行速度×速度倍率
正确答案:正确 -
第19题:
STR12-280机器人例程中motor(r,b,50);实现的功能是()。
- A、机器人左轮以50的速度前进
- B、机器人右轮以50的速度前进
- C、机器人左轮以50的速度后退
- D、机器人右轮以50的速度后退
正确答案:D -
第20题:
下列哪个不会影响机器人的速度()。
- A、机器人的重量
- B、电池电量
- C、机器人的轮胎
- D、机器人传感器的个数
正确答案:D -
第21题:
ZKRT-300机器人例程中motor(l,b,50);表示()。
- A、机器人左轮以50的速度前进
- B、机器人左轮以50的速度后退
- C、机器人右轮以50的速度前进
- D、机器人右轮以50的速度后退
正确答案:B -
第22题:
单选题STR12-280机器人例程中motor(r,b,50);实现的功能是()。A机器人左轮以50的速度前进
B机器人右轮以50的速度前进
C机器人左轮以50的速度后退
D机器人右轮以50的速度后退
正确答案: D解析: 暂无解析 -
第23题:
多选题机器人逆运动学求解方法主要有()。A矩阵代数法
B迭代法
C几何法
D雅克比矩阵法
正确答案: B,C解析: 暂无解析 -
第24题:
填空题求可逆矩阵A的逆矩阵的指令是()正确答案: inv(A)解析: 暂无解析